
PITTSBURGH, PA — Emerging as a powerful symbol of regional industrial pride and the rapid privatization of deep-space logistics, Astrobotic Technology has officially unveiled its massive Griffin-1 lunar lander.
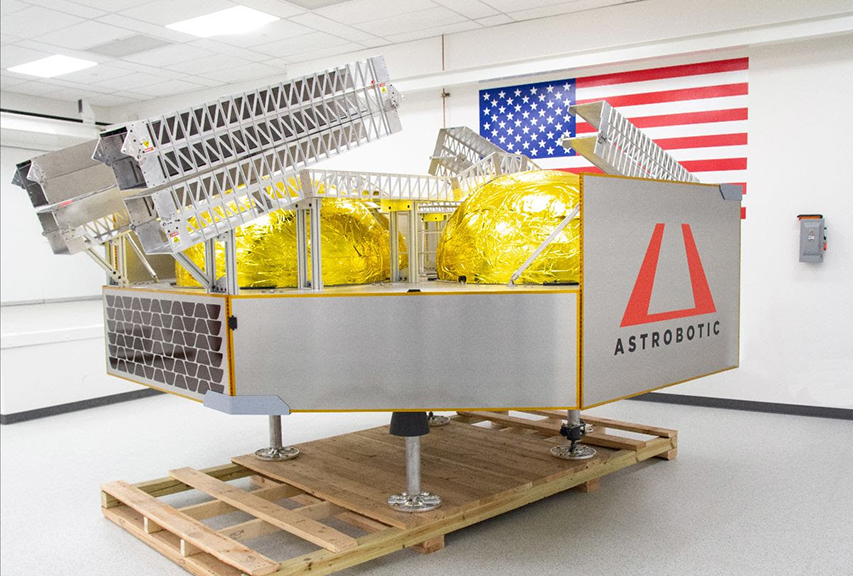
The medium-class spacecraft was showcased inside a specialized cleanroom at the company’s headquarters before a gathering of NASA representatives, public sector leaders, and commercial space partners.
The vehicle, which has been formally designated by NASA as the primary infrastructure vehicle for the Moon Base II task order under the Commercial Lunar Payload Services (CLPS) program, represents a critical stepping stone toward establishing a permanent, self-sustaining human presence on the lunar surface.
Building Infrastructure for the Lunar Economy
Unlike smaller, first-generation commercial scouts, the Griffin platform is an “infrastructure-class” logistics vehicle engineered to transport heavy industrial cargo. Boasting a massive 625 to 650-kilogram payload capacity, the stout aluminum isogrid lander is designed to ferry bulky machinery, scientific sensor arrays, and alternative energy installations directly to the rugged, hazardous terrain of the lunar south pole.
The reveal highlights a dramatic manufacturing turnaround for the Pittsburgh aerospace hub. In an industry traditionally dominated by legacy coastal defense contractors, local leaders revealed that 99% of the hundreds of complex components used to build Griffin-1 were sourced directly from within Pennsylvania.
“Today, Griffin stands behind us as proof of what is possible when talented people spend years solving hard problems together,” said John Thornton, CEO of Astrobotic. “This spacecraft represents the transportation and logistics systems that will enable humanity’s long-term future beyond Earth.“
A Multi-National Manifest
Targeting a precise landing zone at the Nobile Crater near Mons Mouton, Griffin-1 will carry 10 separate payloads representing six different nations, transforming the mission into an international mobile testbed.
Several key payloads have already been integrated into the primary vehicle chassis:
- LandCam-X (European Space Agency): A high-fidelity optical camera system designed to capture close-range surface imagery, validating advanced autonomous landing and terrain-navigation algorithms for future European missions.
- BEACON (Mission Control Space Services & Canadian Space Agency): A joint demonstration featuring Astrobotic’s CubeRover utilizing an AI-driven software platform to test real-time machine learning perception and autonomous navigation over the fine lunar regolith.
- Sovereign Mementos & Cultural Libraries: The manifest includes international cultural artifacts, such as a Nippon Travel Agency plaque bearing messages from Japanese children, and Nanofiche’s Galactic Library, a nanoscale nickel archive designed to preserve human history on the Moon for millions of years.
Integrating the Heavy-Lift Roving Layer
The undisputed centerpiece of the mission manifest is the FLIP (FLEX Lunar Innovation Platform) rover, developed by Venturi Astrolab. Built to serve as a foundational technological blueprint for NASA’s upcoming Lunar Terrain Vehicles (LTV), the heavy-duty rover will test high-mobility logistics, autonomous cargo offloading, and prolonged surface exploration patterns.
To shield the delicate rover during its journey, Astrolab and Astrobotic have structured an unusual integration timeline. Later this month, Griffin-1 will depart Pittsburgh to undergo rigorous qualification and environmental stress simulations at NASA’s Jet Propulsion Laboratory (JPL) in California. The FLIP rover will travel independently, meeting up with the lander at Cape Canaveral, Florida, for final structural stacking and payload encapsulation during the weeks leading up to the launch.
The combined stack is scheduled to launch in late 2026 aboard a SpaceX Falcon Heavy rocket from Launch Complex 39A at the Kennedy Space Center. Following booster separation, flight controllers inside Astrobotic’s Mission Control Center in Pittsburgh will assume direct command, maneuvering the lander through an operational transit timeline that will take between 10.5 and 25.5 days to reach its target destination on the lunar south pole.