

All component-level tests are complete on DARPA’s Robotic Servicing of Geosynchronous Satellites (RSGS) program and the on-orbit demonstration mission is on schedule for launch in 2024 — the RSGS goal is to enable inspection and servicing of satellites in GEO, where hundreds of satellites provide communications, meteorological, national security, and other vital functions. Currently, no options exist for visual diagnosis, upgrades or repairs of a malfunctioning satellite’s components.
Integration of the robotic payload with the spacecraft bus will begin in 2023, followed by testing and verification of the combined system. After launch in 2024, the host vehicle will use highly efficient electric propulsion to climb to GEO. Following a period of checkout and calibration activities, the program anticipates on-orbit satellite servicing activities will begin in 2025.
In 2020, DARPA partnered with SpaceLogistics, a Northrop Grumman company, to provide the spacecraft bus, launch, and operations of the integrated spacecraft in exchange for the ability to use the robotic payload to provide commercial servicing once on-orbit. DARPA is funding the U.S. Naval Research Laboratory (NRL) to lead development of the RSGS robotic servicing capabilities.

The on-orbit system DARPA is providing will include two robotic arms, multiple robotic tools, on-orbit checkout and calibration equipment, equipment stowage ports, cameras and lighting, and associated avionics boxes running advanced robotics control flight software. Each arm consists of seven, high-strength, high-performance joints as well as a tool drive. Avionics boxes provide power, data and control services to the arms.
The RSGS arms are robust enough to be fully testable in Earth gravity. Few, if any, other spaceflight robotic arms, either past or in development, meet this design criterion. This unique characteristic is what makes this combined servicing system singularly capable on-orbit, as well as fully ground testable.
To ensure survival of RSGS during launch stresses and years of operations in the harsh environment of space, both the RSGS robotics payload and the partner-provided bus will undergo extensive testing prior to launch. Major tests include those for basic functionality, vibration stresses simulating those during launch, electromagnetic tests to ensure components work together without interference, and thermal-vacuum exposures that simulate the extreme temperature and vacuum conditions of the space environment.
As with most space systems, RSGS is tested in each of these modes at a component level (by joint or box), then after arm assembly, and again at the vehicle level. The first assembled arm has successfully completed functional, vibration, and electromagnetic testing, and is preparing to begin thermal vacuum testing. The second arm is completing integration and will begin environmental testing this fall at NRL.
RSGS is intended to remain on-orbit over the long term, solving problems on existing spacecraft as they arise. DARPA designed RSGS with the ability to resupply it during flight with additional tools and hardware, enabling it to solve unanticipated or emerging challenges in GEO. With the advent of this in-space robotic capability, a variety of new services will become possible – from rescuing a new spacecraft that encounters a deployment anomaly, to upgrading older satellites that still have useful life. With RSGS, DARPA is establishing the trajectory for an on-orbit servicing industry that benefits both government and commercial clients.
“We are seeking to create a persistent operational dexterous robotic capability in geosynchronous Earth orbit,” said Ana Saplan, RSGS Program Manager in DARPA’s Tactical Technology Office. “This will enable on-orbit satellite repair and upgrade, extending satellite life spans, expanding the capabilities of existing satellites, enhancing spacecraft resilience, and improving the reliability of the current U.S. space infrastructure. Through public-private partnership, DARPA will help propel this technology from demonstration to operational capability. Soon, instead of relegating satellites to space junk because of a broken part or lack of propellant, our robot mechanic will be making repair ‘service calls’ in space.”
“This partnership will enable revolutionary servicing capabilities to commercial and government users for visual diagnostics, upgrades, orbit adjustment, and satellite repairs,” Bernie Kelm, Superintendent of the Spacecraft Engineering Division, U.S. Naval Research Laboratory’s (NRL) Naval Center for Space Technology (NCST), said. “As the robotic payload developer, we designed this innovative set of spaceflight hardware and software that will advance national capabilities in satellite servicing.”
NRL developed the robotic tool to grapple customer satellites via their standard launch vehicle interface and procured another tool to capture resupply elements that are compatible with DARPA’s Payload Orbital Delivery (POD) design standard.
“Our diverse team of NCST engineers has focused their efforts on the robotic payload for the RSGS Program for the last seven years,” William Vincent, NRL’s RSGS program manager, said. “The Robotic Payload is one of NRL’s most complicated payload developments ever.”
NRL engineers developed multiple power and control avionics running on a distributed SpaceWire network to support an extended duration mission to control all the sensors and actuators in a robust and redundant manner. NRL procured panchromatic and color cameras, alongside designing LED lighting units to provide situational awareness during robotic activities.
“Our algorithms team developed machine vision, position control, collision avoidance, and compliance control algorithms that support robotics control and enable autonomous grapple capabilities,” Vincent said. “The algorithms are implemented in flight software which also provides all of the command-and-control functionality for the payload and provides control interfaces to the spacecraft bus.”
Robotic motions require special planning to ensure safe spacecraft operations. NRL has developed the Integrated Robotic Workstation (IRW) to accomplish just that. The IRW supports mission planning for the development of new mission activities. Once a mission is planned, the IRW supports screening activities to pre-screen all robotic motion commands in a payload simulator to verify command loads before they are sent.
Finally, using NRL’s Neptune® ground control software, the IRW commands all robotic payload activities and displays and trends payload telemetry during operations. To execute this effort, a skilled systems engineering team spent years performing system analyses, documenting requirements and interfaces, and generating a robust verification and validation plan.
“The engineers worked closely with the integration and test teams to ensure the system meets all requirements as it comes together for component, subsystem, and payload level testing,” Vincent said. “Once complete, the robotic payload will enable the wide range of missions envisioned and future missions not yet imagined.”
The RSGS team completed environmental testing of the first of two flight robotic arm systems. This included simulating the launch environment in NRL’s vibration lab, simulating both the vacuum and extreme temperature ranges of space in NRL’s thermal vacuum (TVAC) chamber, and ensuring electromagnetic interference (EMI) functionality in EMI chamber testing.
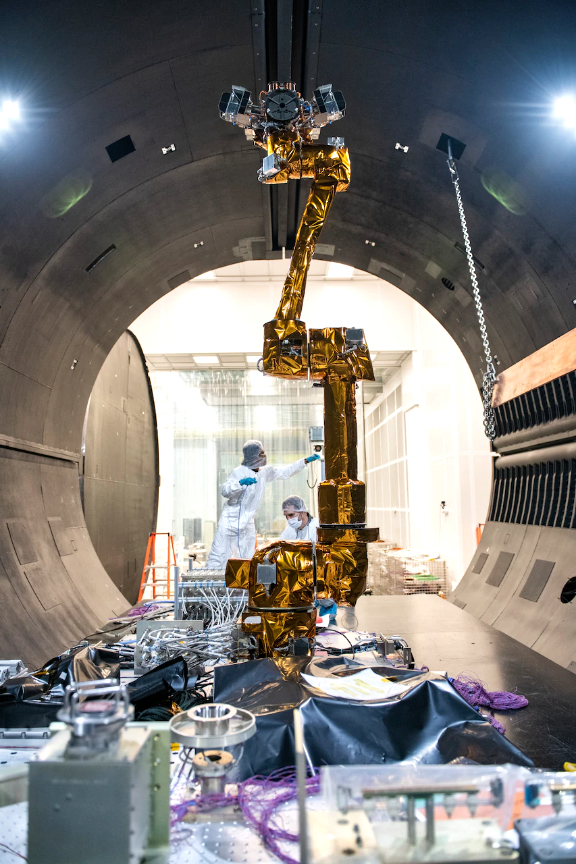
During TVAC testing, the robotic arm system demonstrated performance over temperatures representing actual on-orbit conditions. Under the harsh temperature and vacuum conditions of space, the robot arm performed a variety of operations including running pre-planned robotic calibration movements, tool actuation, and camera and light functions.
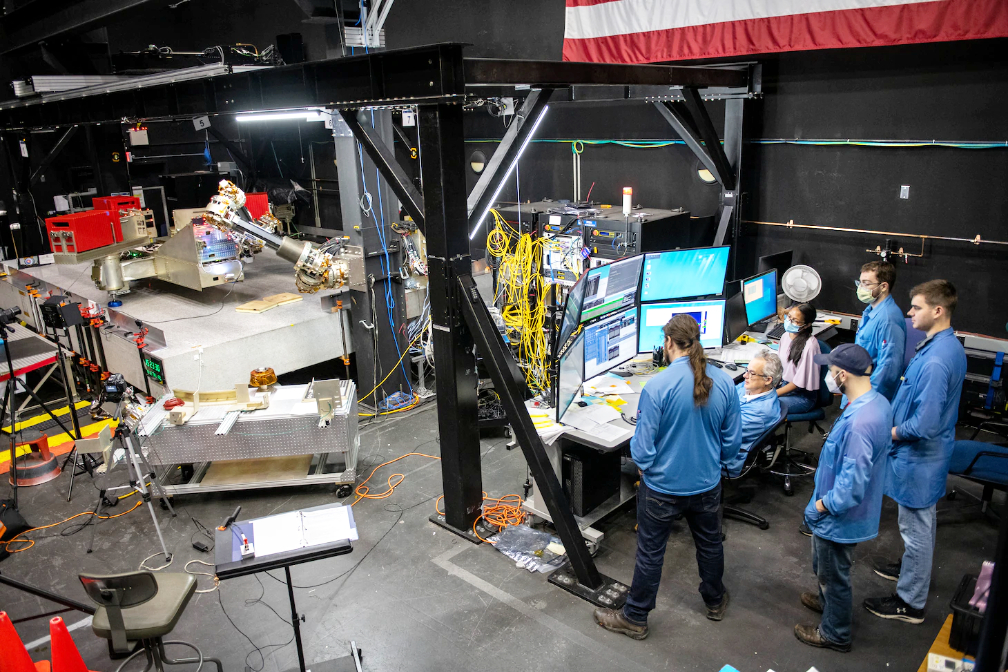
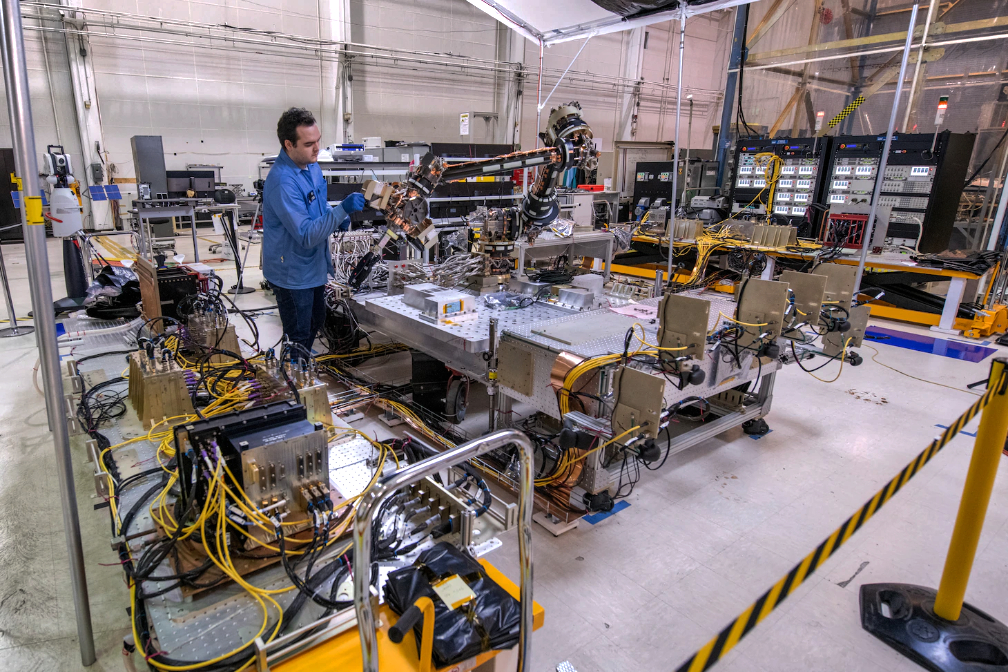
The second robotic arm system is integrated with a separate testbed that has the entire flight avionics suite. The second arm system has completed environmental testing. Robotic performance testing to demonstrate and verify robotic algorithms’ function is underway in the Robotics Testbed (RTB) at NRL’s Space Robotics Laboratory. The RTB consists of a non-spaceflight version of the flight robotic arm system and avionics hardware running flight software. This high-fidelity robotics testbed allows ground verification of many system-level robotic performance characteristics for the RSGS payload.
Compliance Control algorithm characterization and Marman Ring Detector algorithm performance characterization have been completed. Contact dynamics testing uses a sled floating on a thin layer of air to simulate the arm contacting client space vehicles ranging in mass from 75 – 3,000kg (165 – 6,613lbs.). Grapple, articulation, and release testing is scheduled later this summer.
“The systems engineering and verification efforts required by RSGS are extensive,” Amy Hurley, NRL’s Lead Systems Engineer, said. “It is amazing to see years of systems engineering and a strong verification and validation plan come together successfully.”