
 Work on the new technology is being spearheaded in its Irvine, California, office, to address the need to reduce the loss rate of unmanned aerial systems during the landing phase of flight. The Visually Assisted Landing System (VALS) consists of proprietary software and COTS hardware integrated with existing on-board aviation, navigation and visual systems. The system provides high-rate altitude and attitude information to the existing autopilot by using the on board camera systems. No additional ground-based systems or specialized navigation equipment aboard the aircraft are required.
Work on the new technology is being spearheaded in its Irvine, California, office, to address the need to reduce the loss rate of unmanned aerial systems during the landing phase of flight. The Visually Assisted Landing System (VALS) consists of proprietary software and COTS hardware integrated with existing on-board aviation, navigation and visual systems. The system provides high-rate altitude and attitude information to the existing autopilot by using the on board camera systems. No additional ground-based systems or specialized navigation equipment aboard the aircraft are required.
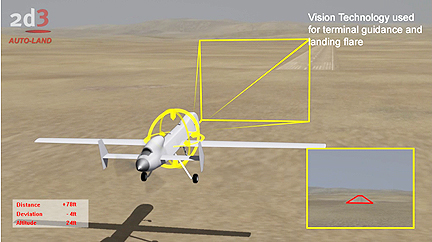 Early trials have proven that existing cameras and sensor data can be processed using advanced vision science techniques, allowing the aircraft to land without human intervention. Current UAV operations call for a remote pilot to land the aircraft manually through the use of stick and throttle control inputs transmitted wirelessly. Operators are reliant on the ability to view the runway via RF broadcast video. Any loss of communication, link or video quality can have a dire effect on the successful outcome of the landing. By providing what is essentially a vision-based sensor, 2d3 have provided a way to enable repeatable and safe landings when no remote pilot is available due to loss of control signal or no available RF link at an unplanned airport.
Early trials have proven that existing cameras and sensor data can be processed using advanced vision science techniques, allowing the aircraft to land without human intervention. Current UAV operations call for a remote pilot to land the aircraft manually through the use of stick and throttle control inputs transmitted wirelessly. Operators are reliant on the ability to view the runway via RF broadcast video. Any loss of communication, link or video quality can have a dire effect on the successful outcome of the landing. By providing what is essentially a vision-based sensor, 2d3 have provided a way to enable repeatable and safe landings when no remote pilot is available due to loss of control signal or no available RF link at an unplanned airport.
Jon Damush, 2d3’s President, said, “”Interestingly, humans can not land airplanes without being able to see the runway, yet we expect Unmanned Aerial Systems to do that all the time, using sensors that are not ideally suited to the task. While we are still a ways away from being able to fly an airplane completely visually with an automated system, this technology will initially provide augmentation to existing systems, ensuring the aircraft always gets back down in the event of the feared loss of control link.” Damush continued, “It is our hope that solutions such as VALS will serve as building blocks for additional vision-based solutions on-board existing and future airborne platforms.”